Tutorial · February 2026 · 15 min read
QEMU on Arch Linux: A Practical Guide to Virtual Machine Testing
From cloud images and package building to kernel module debugging and cross-platform validation — all from the command line.
Contents
01 Why QEMU?
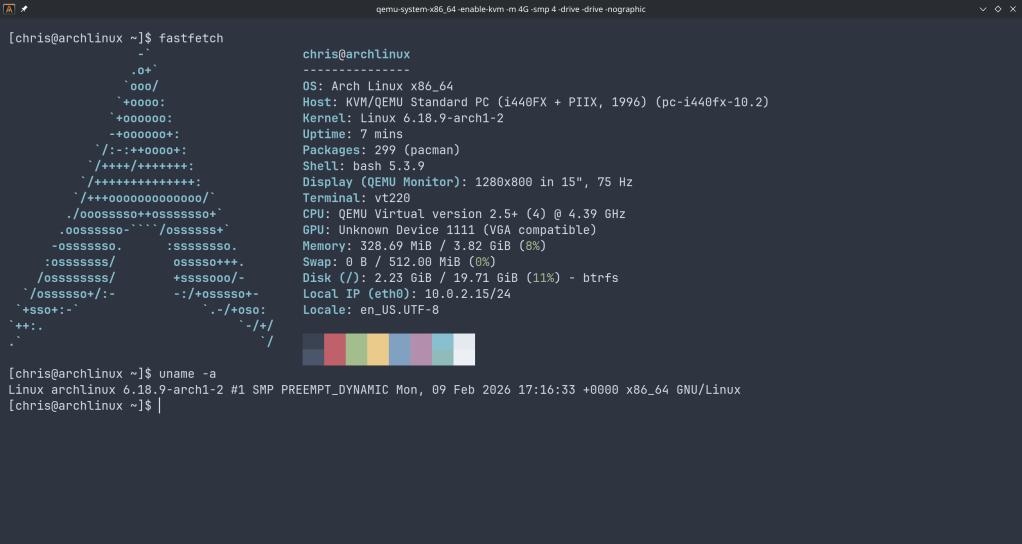
02 Spinning Up Arch Linux Cloud Images
03 Running FreeBSD in QEMU
04 Testing OpenZFS with QEMU
05 Sharing Files Between Host and Guest
06 Networking Options
07 Testing Real Hardware Drivers
08 Quick Reference
Why QEMU?
QEMU combined with KVM turns your Linux host into a bare-metal hypervisor. Unlike VirtualBox or VMware, QEMU offers direct access to hardware emulation options, PCI passthrough, and granular control over every aspect of the virtual machine. On Arch Linux, setup is minimal.
$ sudo pacman -S qemu-full
# Verify KVM support
$ lsmod | grep kvm
kvm_amd 200704 0
kvm 1302528 1 kvm_amd
You should see kvm_amd or kvm_intel loaded. That’s it — you’re ready to run VMs at near-native performance.
Spinning Up Arch Linux Cloud Images
The fastest path to a working Arch Linux VM is the official cloud image — a pre-built qcow2 disk designed for automated provisioning with cloud-init.
Download and Prepare
$ curl -LO https://geo.mirror.pkgbuild.com/images/latest/Arch-Linux-x86_64-cloudimg.qcow2
$ qemu-img resize Arch-Linux-x86_64-cloudimg.qcow2 20G
The image ships at a minimal size. Resizing to 20G gives room for package building, compilation, and development work.
Cloud-Init Configuration
Cloud images expect a cloud-init seed to configure users, packages, and system settings on first boot. Install cloud-utils on your host:
$ sudo pacman -S cloud-utils
Create a user-data file. Note the unquoted heredoc — this ensures shell variables expand correctly:
SSH_KEY=$(cat ~/.ssh/id_ed25519.pub 2>/dev/null || cat ~/.ssh/id_rsa.pub)
cat > user-data <<EOF
#cloud-config
users:
- name: chris
sudo: ALL=(ALL) NOPASSWD:ALL
shell: /bin/bash
lock_passwd: false
plain_text_passwd: changeme
ssh_authorized_keys:
- ${SSH_KEY}
packages:
- base-devel
- git
- vim
- devtools
- namcap
growpart:
mode: auto
devices: ['/']
EOF
⚠ Common Pitfall
Using 'EOF' (single-quoted) prevents variable expansion, so ${SSH_KEY} becomes a literal string. Always use unquoted EOF when you need variable substitution.
Generate the seed ISO and launch:
$ cloud-localds seed.iso user-data
$ qemu-system-x86_64 \
-enable-kvm \
-m 4G \
-smp 4 \
-drive file=Arch-Linux-x86_64-cloudimg.qcow2,if=virtio \
-drive file=seed.iso,format=raw,if=virtio \
-nographic
Cloud-Init Runs Once
Cloud-init marks itself as complete after the first boot. If you modify user-data and rebuild seed.iso, the existing image ignores it. You must download a fresh qcow2 image before applying new configuration.
Use Ctrl+A, X to kill the VM.
Running FreeBSD in QEMU
FreeBSD provides pre-built VM images in qcow2 format. FreeBSD 15.0-RELEASE (December 2025) is the latest stable release, while 16.0-CURRENT snapshots are available for testing bleeding-edge features.
Download
# FreeBSD 15.0 stable
$ curl -LO https://download.freebsd.org/releases/VM-IMAGES/15.0-RELEASE/amd64/Latest/FreeBSD-15.0-RELEASE-amd64-ufs.qcow2.xz
$ xz -d FreeBSD-15.0-RELEASE-amd64-ufs.qcow2.xz
# FreeBSD 16.0-CURRENT (development snapshot)
$ curl -LO https://download.freebsd.org/snapshots/VM-IMAGES/16.0-CURRENT/amd64/Latest/FreeBSD-16.0-CURRENT-amd64-ufs.qcow2.xz
$ xz -d FreeBSD-16.0-CURRENT-amd64-ufs.qcow2.xz
$ qemu-img resize FreeBSD-15.0-RELEASE-amd64-ufs.qcow2 20G
The Serial Console Challenge
Unlike Linux cloud images, FreeBSD VM images default to VGA console output. Launching with -nographic appears to hang — the system is actually booting, but sending output to the emulated display.
Boot with VGA first to configure serial:
$ qemu-system-x86_64 \
-enable-kvm \
-m 4G \
-smp 4 \
-hda FreeBSD-15.0-RELEASE-amd64-ufs.qcow2 \
-vga std
Login as root (no password), then enable serial console permanently:
# echo 'console="comconsole"' >> /boot/loader.conf
# poweroff
All subsequent boots work with -nographic. Alternatively, at the FreeBSD boot menu, press 3 to escape to the loader prompt and type set console=comconsole then boot.
Disk Interface Note
If FreeBSD fails to boot with if=virtio, fall back to IDE emulation using -hda instead. IDE is universally supported.
Testing OpenZFS with QEMU
One of the most powerful uses of QEMU on Arch Linux is building and testing OpenZFS against new kernels. Arch’s rolling release model means kernel updates arrive frequently, and out-of-tree modules like ZFS need validation after every update.
Build Environment
$ git clone https://github.com/openzfs/zfs.git
$ cd zfs
$ ./autogen.sh
$ ./configure --enable-debug
$ make -j$(nproc)
$ sudo make install
$ sudo ldconfig
$ sudo modprobe zfs
Running the ZFS Test Suite
Before running the test suite, a critical and often-missed step — install the test helpers:
$ sudo ~/zfs/scripts/zfs-helpers.sh -i
# Create loop devices for virtual disks
for i in $(seq 0 15); do
sudo mknod -m 0660 /dev/loop$i b 7 $i 2>/dev/null
done
# Run sanity tests
$ ~/zfs/scripts/zfs-tests.sh -v -r sanity
Real-World Debugging: From 18% to 97.6%
Testing OpenZFS 2.4.99 on kernel 6.18.8-arch2-1 revealed two cascading issues that dropped the pass rate dramatically. Here’s what happened and how to fix it.
18%
Before fixes
97.6%
After fixes
808
Tests passed
Problem 1: Permission denied for ephemeral users. The test suite creates temporary users (staff1, staff2) for permission testing. If your ZFS source directory is under a home directory with restrictive permissions, these users can’t traverse the path:
err: env: 'ksh': Permission denied
staff2 doesn't have permissions on /home/arch/zfs/tests/zfs-tests/bin
$ chmod o+x /home/arch
$ chmod -R o+rx /home/arch/zfs
$ sudo chmod o+rw /dev/zfs
Problem 2: Leftover test pools cascade failures. If a previous test run left a ZFS pool mounted, every subsequent setup script fails with “Device or resource busy”:
$ sudo zfs destroy -r testpool/testfs
$ sudo zpool destroy testpool
$ rm -rf /var/tmp/testdir
✓ Result
After fixing both issues, the sanity suite completed in 15 minutes: 808 PASS, 6 FAIL, 14 SKIP. The remaining 6 failures were all environment-related (missing packages) — zero kernel compatibility regressions.
Sharing Files Between Host and Guest
QEMU’s 9p virtfs protocol allows sharing a host directory with the guest without network configuration — ideal for an edit-on-host, build-in-guest workflow:
$ qemu-system-x86_64 \
-enable-kvm \
-m 4G \
-smp 4 \
-drive file=Arch-Linux-x86_64-cloudimg.qcow2,if=virtio \
-virtfs local,path=/home/chris/shared,mount_tag=host_share,security_model=mapped-xattr,id=host_share \
-nographic
Inside the guest:
$ sudo mount -t 9p -o trans=virtio host_share /mnt/shared
Networking Options
QEMU’s user-mode networking (-nic user) is the simplest setup — it provides NAT-based internet access and port forwarding without any host configuration:
# Forward host port 2222 to guest SSH
-nic user,hostfwd=tcp::2222-:22
This is sufficient for most development and testing workflows. For bridged or TAP networking, consult the QEMU documentation.
Testing Real Hardware Drivers
QEMU emulates standard hardware (e1000 NICs, emulated VGA), not your actual devices. If you need to test drivers against real hardware — such as a Realtek Ethernet controller or an AMD GPU — you have two options:
PCI Passthrough (VFIO): Bind a real PCI device to the vfio-pci driver and pass it directly to the VM. This requires IOMMU support (amd_iommu=on in the kernel command line) and removes the device from the host for the duration.
Native Boot from USB: Write a live image to a USB stick and boot your physical machine directly. For driver testing, this is almost always the better choice:
$ sudo dd if=FreeBSD-16.0-CURRENT-amd64-memstick.img of=/dev/sdX bs=4M status=progress
Quick Reference
| Task |
Command |
| Start Arch VM | qemu-system-x86_64 -enable-kvm -m 4G -smp 4 -drive file=arch.qcow2,if=virtio -drive file=seed.iso,format=raw,if=virtio -nographic |
| Start FreeBSD (VGA) | qemu-system-x86_64 -enable-kvm -m 4G -smp 4 -hda freebsd.qcow2 -vga std |
| Start FreeBSD (serial) | qemu-system-x86_64 -enable-kvm -m 4G -smp 4 -hda freebsd.qcow2 -nographic |
| Kill VM | Ctrl+A, X |
| Resize disk | qemu-img resize image.qcow2 20G |
| Create seed ISO | cloud-localds seed.iso user-data |
QEMU
Arch Linux
FreeBSD
OpenZFS
KVM
Written from real-world testing on AMD Ryzen 9 9900X · Arch Linux · Kernel 6.18.8